能控性
:是控制作用u(t)支配系统的状态向量x(t)的能力;回答u(t) 能否使x(t)作任意转移的问题。
能观性
:是系统的输出y(t)反映系统状态向量x(t)的能力,反映从外 部对系统内部的观测能力。回答能否通过y(t)的量测确定状态 x(t)的问题。
线性定常系统的能控性判别:
1.约旦标准型系统的能控性判别:
无重根时:

有重根时:

特殊情况:

※非奇异线性变换不改变系统的能控性
2.直接从(A, B)判别系统的能控性:

判断满秩的简单方法:
能观性:
由于能观测性所表示的是输出y(t) 反映状态向量x(t)的能力,与控制作用u(t)无直接关系,所以在分析能观测性问题时,可以不考虑控制作用的存在,只需从齐次状态方程和输出方程出发,如果对于任意给定的输入u(已知),在有限观测时间tf>t0,使得根据[t0, tf]期间的输出y(t)能唯一地确定系统在初始时刻的状态x(t0),则称状态x(t0)是能观的,若系统的每一个状态都是能观的,则称系统是状态完全能观的,或简称是能观的。
几点说明:
1.能观性表示的是输出y(t)反映状态向量x(t)的能力,而控制作用u(t)所引起的输出是可以计算的,所以分析系统能观性问题时看设u(t)≡0,这样只需要从齐次状态方程和输出方程出发,即分析系统(A, C)的能观性。
2.从输出方程y=Cx可以看出,如dimy=m=dimx=n,且C满秩则由y(t)求解x(t)是十分简单的,可用 x(t)=C-1y(t)
3.通常情况是m<n,为了从m维输出分量y(t)唯一地确定n个状态变量,必须在不同时刻多测量几组输出数据,因此观测时间必须满足tf≥t0的要求。
4.在定义中被把能观性定义为对初始状态的确定,是因为一旦确定了初始状态,即可根据系统的输入和状态方程解出任意t>t0时刻系统的瞬时状态。
能观性判别方法:
1.转成约旦标准型判断:
不含有重根:

含有重根:

特殊情况:
2.使用A,C矩阵判别:
3.4离散时间系统的能控性和能观性
3.6 对偶关系
对偶系统:

系统S1和S2是互为对偶的两个系统,则S1的能控性等价于S2的能观性,而S1的能观性等价于S2的能控性。换言之,若S1是状态完能控的(完全能观的)则S2就是状态完全能观的(状态完全能控的)。
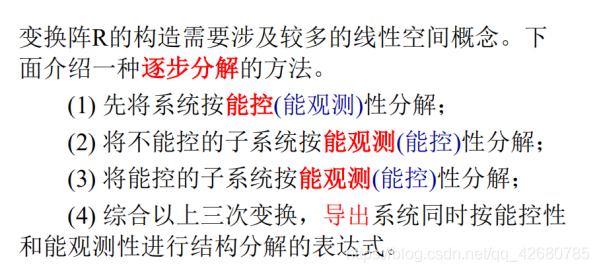
3.8 线性系统的结构分解
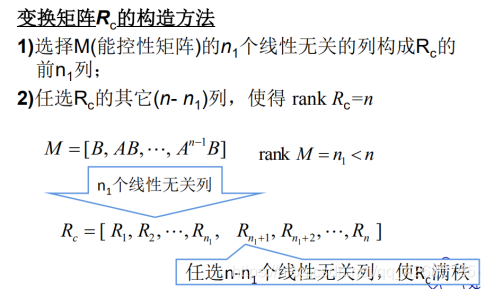
1.按能控性分解:
性质:
(1)n1维子空间是能控的
(2)子系统的传递函数阵与原系统的传递函数阵相等
(c表示control控制)
2.按能观性分解
性质:
(1)n1子系统是能观的
(2)能观子系统的传递函数阵与原系统的传递函数阵相等

3.按能控能观性分解
3.9函数阵的实现问题
定义:对于线性定常系统,给定其传递函数阵W(s),若可以找到一状态空间表达式S(A,B,C,D) ,使下式成立C(sI−A)−1B+D = W(s)则称此状态空间表达式S为给定传递函数矩阵W(s)的一个实现。

(1)SISO系统可根据能控能观标准型实现列写。
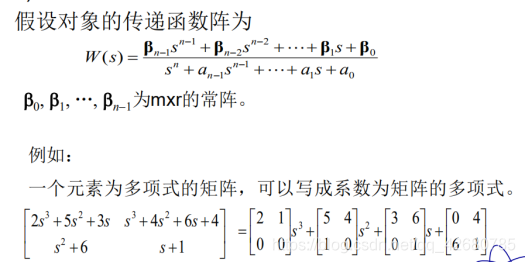
(2)MIMO系统:


最小实现:
实现步骤:

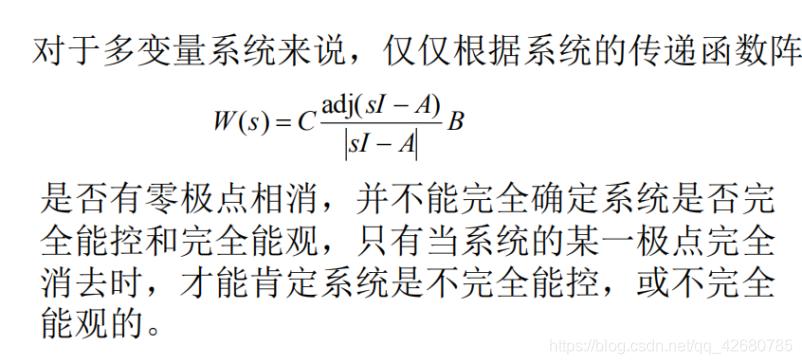
3.10极性对消与能观能控性

第3章线性控制系统的能控性和能观性能控性:是控制作用u(t)支配系统的状态向量x(t)的能力;回答u(t) 能否使x(t)作任意转移的问题。能观性:是系统的输出y(t)反映系统状态向量x(t)的能力,反映从外 部对系统内部的观测能力。回答能否通过y(t)的量测确定状态 x(t)的问题。线性定常系统的能控性判别:1.约旦标准型系统的能控性判别:无重根时:有重根时:特殊情况:※非奇异线性变换不改变系统的能控性2.直接从(A, B)判别系统的能控性:判断满秩的简单方法:能观性
文章目录一、能
控性
二、能
观性
三、能控与能观的对偶关系1.对偶系统2.对偶原理
四
、能控标准型与能观标准型1.单输入系统能控标准1型2.单输入系统能控标准2型3.单输入系统能观标准1型与能观标准2型五、线性系统的结构
分解
1.按能
控性
分解
2.按能
观性
分解
六、传递函数
矩阵
的实现七、能
控性
、能
观性
与传递函数阵的关系
一、能
控性
通过改变输入量u,能使状态变量由任意初态转移到终态,则称系统状态完全能控
约旦标准型判据
对于状态方程x˙=Ax+Bu\dot x=Ax+Bux˙=Ax+Bu
判据1:A为对角型且特征值互.
①T^{-1}AT为对角线,且特征值互异,则T^{-1}B不存在全零行时系统能控;
若有相同特征值,则在满足上述要求的前提下,各特征值对应的T^{-1}B的行元素线性无关时系统能控。
②T^{-1}AT中有约旦块,且每个约旦块特征值互异,则T^{-1}B中对应各约旦块的最后一行为非全零行时系统能控;
若存在特征值相同的约旦块,则在满足上述要求的前提下,特征值相同的各约旦块对应的T^{-1}B的最后一行线性无关时系统能控。
2).能控阵判别
现控
笔记
(
四
):能
控性
和能
观性
能
控性
:是控制作用u(t)支配系统的状态向量x(t)的能力;回答u(t) 能否使x(t)作任意转移的问题。能
观性
:是系统的输出y(t)反映系统状态向量x(t)的能力,反映从外 部对系统内部的观测能力。回答能否通过y(t)的量测确定状态 x(t)的问题。
很高兴为您提供回复。
spring mvc 是一种基于 Java 的 web 框架,它可以帮助开发者快速构建 web 应用程序。在学习 spring mvc 的过程中,第一步就是编写一个简单的 helloworld 程序。
在这个 helloworld 程序中,我们需要创建一个控制器类,这个类需要使用 @Controller 注解来标识。然后,我们需要在这个类中编写一个处理请求的方法,这个方法需要使用 @RequestMapping 注解来标识。
在这个方法中,我们可以编写一些简单的逻辑,比如输出一段文本或者返回一个视图。最后,我们需要在配置文件中配置这个控制器类,以便让 spring mvc 能够找到它并将请求转发给它。
总的来说,学习 spring mvc 的 helloworld 程序是一个很好的入门练习,它可以帮助我们了解 spring mvc 的基本原理和使用方法。

