安装卸载了很多次,终于解决了所有问题。
我最想说的是:
在安装N卡驱动之前,一定要先禁用自带的驱动!!!!!!不然就会黑屏!!!!!!!
详细版本
适配版本
(注意把加的nomodeset改为acpi_osi=linux nomodeset)
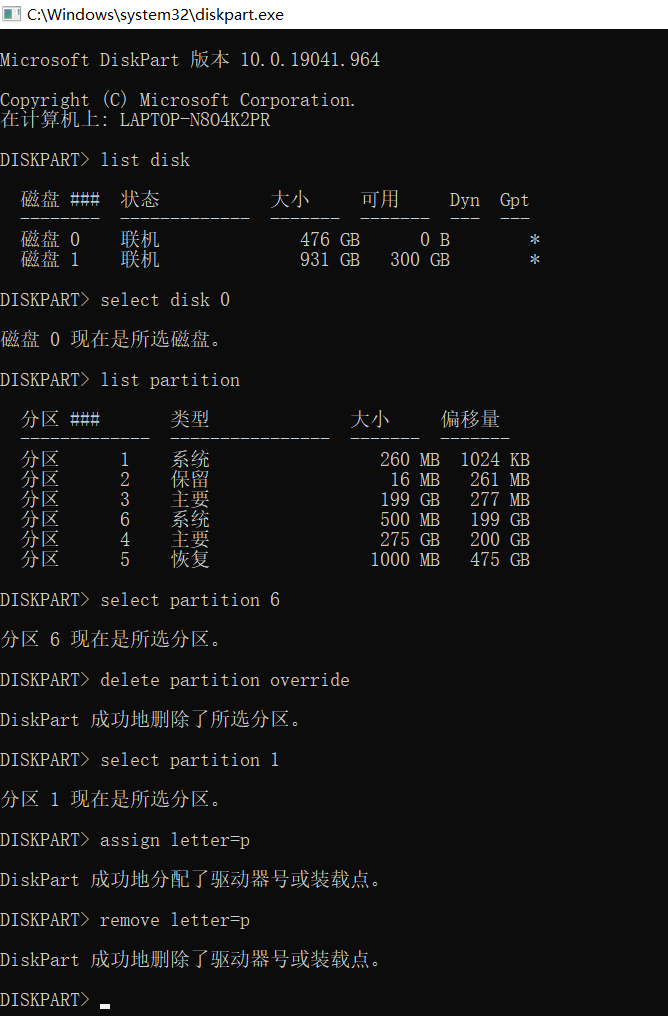
直接删除卷
再
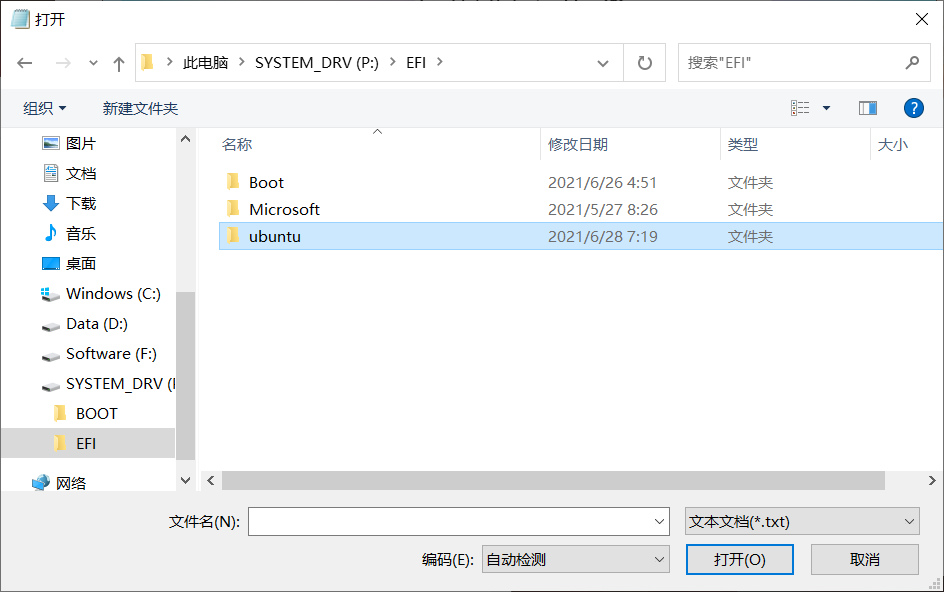
删除引导项
亮度不能调节应该是因为没有安装官网驱动
,安装时一定要不选在-no-opengl,opengl一定要安装
安装之前一定要先卸载自带的驱动
详细安装驱动教程
出现过很多次黑屏,原因在于:
使用了显卡直连,但是N卡驱动混乱(多个驱动共存或者没有驱动)
可以换成混合模式,这样可以进入系统
然后卸载掉所有已经安装的N卡驱动,禁用掉自带驱动(这些方法上面都有)
再次安装合适的驱动
重启时换成显卡直连启动,就可以进入
亮度应该还是无法调节,只能用软件调节,暂无办法
联想拯救者R7000P2021安装Ubuntu双系统安装卸载驱动问题安装详细版本适配版本(注意把加的nomodeset改为acpi_osi=linux nomodeset)卸载直接删除卷,再删除引导项驱动问题亮度不能调节应该是因为没有安装官网驱动安装之前一定要先卸载自带的驱动详细安装驱动教程...
Ubuntu
系统
安装
的教程,在CSDN、简书、知乎上多的数不胜数,但是
拯救者
R7000P用的是AMD的处理器,
安装
完
Ubuntu
系统后,不能正常开机,会出现如下错误界面:
(本解决办法的使用前提是已经在R7P上
安装
了
Ubuntu
18的系统,但是开机无界面显示!!!!!!)
解决方法:在插入启动盘的情况下,开机,狂按F12键,选择U盘启动,enter,随后在弹出的界面,如下:
通过移动方向键,将Install
Ubuntu
置为高亮,这个时候一定不能再按enter键,而是按键盘上的e键,进入edit编辑模式
联想
拯救者
r7000p
安装
Linux
双系统
1、准备一个U盘,直接点击U盘,右键,格式化,之后一直保持U盘插在电脑上的状态,直至
安装
结束
2、下载Linux系统
版本
,我这里
安装
的是18.04.5(原装系统Win10),下载网址:
http://mirror.hust.edu.cn/
ubuntu
-releases/18.04.4/
ubuntu
-18.04.5-desktop-amd64.iso
下载后放在Win10系统内就行
3、百度搜索rufus,下载箭头所指向的
版本
安装
在Win10系统下的随意一个文件就行
联想
拯救者
r7000p
安装
Linux
双系统
(二)
接上一篇博客:
联想
拯救者
r7000p
安装
Linux
双系统
(一)
执行第一条命令之后,会出现一个界面,直接按enter继续就行。然后执行前面的后两条命令,需要下载
安装
东西,时间较长,耐心等一下哟~
之后出现下面的界面,表示命令执行完毕,之后进行重启就好了
此时,进入Linux系统之后,可能还会出现语言更新的框,直接按照之前的步骤进行即可。
之前可以直接点桌面右上角的小图标可以进行联网,但是后来发现又没有了,大佬说这个是因为这个系统和我电脑不兼容,所以会出现W
3.wifi不能用怎么办?——最大烦恼
3.1 无线硬件开关关闭的问题
联想
笔记本
ubuntu
初装后wifi不能用是很正常的事情,但是此时R7000的有线网络居然也不能用,简直糟糕。
很多帖子都有介绍该如何去解决,此处大概描述一下。
命令行输入:
frkill list all
本应该出现如下提示:
但是很不幸,R7000只有前两行,此处导致我重装系统三次,前两行是
联想
的网络控制,后
联想
拯救者
R7000P
安装
Ubuntu
21.04 出现屏幕亮度不能调节的问题1. 基本配置2. 摸索3. 变故4. 找原因5. 总结
1. 基本配置
笔记本电脑:
联想
拯救者
R7000P(如果是使用 Linux,我劝大伙别买 NVIDIA 显卡的电脑,因为它不开源,它的驱动会有很多毛病。)
安装
系统:
Ubuntu
21.04
2. 摸索
按照正常流程,
安装
好系统,此时,屏幕亮度调节键 Fn+F5/F6 和 系统设置的亮度调节滑块是失效的。
网上一大堆教程…一上来就让装什么JB闭源驱动,开源驱动,我一个

