

如何直观地理解「协方差矩阵」?

协方差矩阵在统计学和机器学习中随处可见,一般而言,可视作 方差 和 协方差 两部分组成,即方差构成了对角线上的元素,协方差构成了非对角线上的元素。本文旨在从几何角度介绍我们所熟知的协方差矩阵。
文章结构
- 方差和协方差的定义
- 从方差/协方差到协方差矩阵
- 多元正态分布与线性变换
- 协方差矩阵的特征值分解
1. 方差和协方差的定义
在统计学中, 方差 是用来度量 单个随机变量 的 离散程度 ,而协方差则一般用来刻画 两个随机变量 的 相似程度 ,其中, 方差 的计算公式为
\sigma_x^2=\frac{1}{n-1}\sum_{i=1}^n\left(x_i-\bar{x}\right)^2
其中, n 表示样本量,符号 \bar{x} 表示观测样本的均值,这个定义在初中阶段就已经开始接触了。
在此基础上, 协方差 的计算公式被定义为
\sigma\left(x,y\right)=\frac{1}{n-1}\sum_{i=1}^{n}\left(x_i-\bar{x}\right)\left(y_i-\bar{y}\right)
在公式中,符号 \bar{x},\bar{y} 分别表示两个随机变量所对应的观测样本均值,据此,我们发现:方差 \sigma_x^2 可视作随机变量 x 关于其自身的协方差 \sigma\left(x,x\right) .
2. 从方差/协方差到协方差矩阵
根据方差的定义,给定 d 个随机变量 x_k,k=1,2,...,d ,则这些 随机变量的方差 为
\sigma({x_k},{x_k})=\frac{1}{n-1}\sum_{i=1}^n\left(x_{ki}-\bar{x}_k\right)^2,k=1,2,...,d
其中,为方便书写, x_{ki} 表示随机变量 x_k 中的第 i 个观测样本, n 表示样本量,每个随机变量所对应的观测样本数量均为 n 。
对于这些随机变量,我们还可以根据协方差的定义,求出 两两之间的协方差 ,即
\sigma\left(x_m,x_k\right)=\frac{1}{n-1}\sum_{i=1}^n\left(x_{mi}-\bar{x}_m\right)\left(x_{ki}-\bar{x}_k\right)
因此, 协方差矩阵 为
\Sigma=\left[ \begin{array}{ccc}\sigma({x_1},{x_1}) & \cdots & \sigma\left(x_1,x_d\right) \\ \vdots & \ddots & \vdots \\ \sigma\left(x_d,x_1\right) & \cdots & \sigma({x_d},{x_d}) \\ \end{array} \right]\in\mathbb{R}^{d\times d}
其中,对角线上的元素为各个随机变量的方差,非对角线上的元素为两两随机变量之间的协方差,根据协方差的定义,我们可以认定:矩阵 \Sigma 为 对称矩阵 (symmetric matrix),其大小为 d\times d 。
3. 多元正态分布与线性变换
假设一个向量 \boldsymbol{x} 服从均值向量为 \boldsymbol{\mu} 、协方差矩阵为 \Sigma 的多元正态分布(multi-variate Gaussian distribution),则
p\left(\boldsymbol{x}\right)=\left|2\pi\Sigma\right|^{-1/2}\exp\left(-\frac{1}{2}\left(\boldsymbol{x}-\boldsymbol{\mu}\right)^T\Sigma^{-1}\left(\boldsymbol{x}-\boldsymbol{\mu}\right)\right)
令该分布的均值向量为 \boldsymbol{\mu}=\boldsymbol{0} ,由于指数项外面的系数 \left|2\pi\Sigma\right|^{-1/2} 通常作为常数,故可将多元正态分布简化为
p\left(\boldsymbol{x}\right)\propto\exp\left(-\frac{1}{2}\boldsymbol{x}^T\Sigma^{-1}\boldsymbol{x}\right)
再令 \boldsymbol{x}=\left(y,z\right)^T ,包含两个随机变量 y 和 z ,则协方差矩阵可写成如下形式:
\Sigma=\left[ \begin{array}{cc}\sigma(y,y) & \sigma\left(y,z\right) \\ \sigma\left(z,y\right) & \sigma(z,z) \\ \end{array} \right]\in\mathbb{R}^{2\times 2}
用 单位矩阵 (identity matrix) I 作为协方差矩阵,随机变量 y 和 z 的 方差均为1 ,则生成如干个随机数如图1所示。
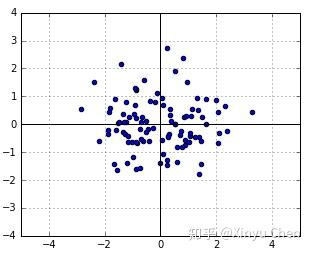
在生成的若干个随机数中,每个点的似然为
\mathcal{L}\left(\boldsymbol{x}\right)\propto\exp\left(-\frac{1}{2}\boldsymbol{x}^T\boldsymbol{x}\right)
对图1中的所有点考虑一个 线性变换 (linear transformation): \boldsymbol{t}=A\boldsymbol{x} ,我们能够得到图2.
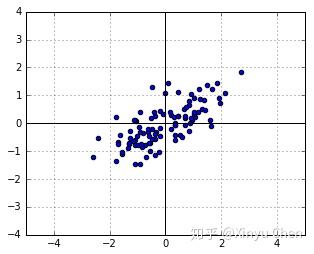
在线性变换中,矩阵 A 被称为 变换矩阵 (transformation matrix),为了将图1中的点经过线性变换得到我们想要的图2,其实我们需要构造两个矩阵:
- 尺度矩阵 (scaling matrix):
S=\left[ \begin{array}{cc} s_y & 0 \\ 0 & s_z \\ \end{array} \right]
- 旋转矩阵 (rotation matrix)
R=\left[ \begin{array}{cc} \cos(\theta) & -\sin(\theta) \\ \sin(\theta) & \cos(\theta) \\ \end{array} \right]
其中, \theta 为 顺时针旋转的度数 。
变换矩阵、尺度矩阵和旋转矩阵三者的关系式:
A=RS
在这个例子中,尺度矩阵为 S=\left[ \begin{array}{cc} 1 & 0 \\ 0 & \frac{1}{2} \\ \end{array} \right] ,旋转矩阵为 R=\left[ \begin{array}{cc} \cos(-\frac{\pi}{6}) & -\sin(-\frac{\pi}{6}) \\ \sin(-\frac{\pi}{6}) & \cos(-\frac{\pi}{6}) \\ \end{array} \right] =\left[ \begin{array}{cc} \frac{\sqrt{3}}{2} & \frac{1}{2} \\ -\frac{1}{2} & \frac{\sqrt{3}}{2} \\ \end{array} \right] ,故变换矩阵为
A=RS=\left[ \begin{array}{cc} \frac{\sqrt{3}}{2} & \frac{1}{4} \\ -\frac{1}{2} & \frac{\sqrt{3}}{4} \\ \end{array} \right] .
另外,需要考虑的是,经过了线性变换, \boldsymbol{t} 的分布是什么样子呢 ?
将 \boldsymbol{x}=A^{-1}\boldsymbol{t} 带入前面给出的似然 \mathcal{L}\left(\boldsymbol{x}\right) ,有
\mathcal{L}\left(\boldsymbol{t}\right)\propto\exp\left(-\frac{1}{2}\left(A^{-1}\boldsymbol{t}\right)^T\left(A^{-1}\boldsymbol{t}\right)\right)
=\exp\left(-\frac{1}{2}\boldsymbol{t}^T\left(AA^{T}\right)^{-1}\boldsymbol{t}\right)
由此可以得到,多元正态分布的协方差矩阵为
\Sigma=AA^{T}=\left[ \begin{array}{cc} \frac{\sqrt{3}}{2} & \frac{1}{4} \\ -\frac{1}{2} & \frac{\sqrt{3}}{4} \\ \end{array} \right]\left[ \begin{array}{cc} \frac{\sqrt{3}}{2} & -\frac{1}{2} \\ \frac{1}{4} & \frac{\sqrt{3}}{4} \\ \end{array} \right] =\left[ \begin{array}{cc} \frac{13}{16} & -\frac{3\sqrt{3}}{16} \\ -\frac{3\sqrt{3}}{16} & \frac{7}{16} \\ \end{array} \right] .
4. 协方差矩阵的特征值分解
回到我们已经学过的线性代数内容,对于任意对称矩阵 \Sigma ,存在一个 特征值分解(eigenvalue decomposition, EVD) :
\Sigma=U\Lambda U^T
其中, U 的每一列都是相互正交的特征向量,且是单位向量,满足 U^TU=I , \Lambda 对角线上的元素是从大到小排列的特征值,非对角线上的元素均为0。
当然,这条公式在这里也可以很容易地写成如下形式:
\Sigma=\left(U\Lambda^{1/2}\right)\left(U\Lambda^{1/2}\right)^T=AA^T
其中, A=U\Lambda^{1/2} ,因此,通俗地说, 任意一个协方差矩阵都可以视为线性变换的结果 。
在上面的例子中, 特征向量构成的矩阵 为
U=R=\left[ \begin{array}{cc} \cos(\theta) & -\sin(\theta) \\ \sin(\theta) & \cos(\theta) \\ \end{array} \right]=\left[ \begin{array}{cc} \frac{\sqrt{3}}{2} & \frac{1}{2} \\ -\frac{1}{2} & \frac{\sqrt{3}}{2} \\ \end{array} \right] .
特征值构成的矩阵 为
\Lambda=SS^T=\left[ \begin{array}{cc} s_y^2 & 0 \\ 0 & s_z^2 \\ \end{array} \right]=\left[ \begin{array}{cc} 1 & 0 \\ 0 & \frac{1}{4} \\ \end{array} \right] .
到这里,我们发现:多元正态分布的概率密度是由 协方差矩阵的特征向量控制旋转(rotation) , 特征值控制尺度(scale) ,除了协方差矩阵, 均值向量会控制概率密度的位置 ,在图1和图2中,均值向量为 \boldsymbol{0} ,因此,概率密度的中心位于坐标原点。
相关参考:
好书推荐
一、《矩阵计算》被誉为数值计算领域的“圣经”,该书以线性代数为基础,系统地介绍了矩阵计算的基本理论和方法,并附有大量算法、习题和参考文献,据谷歌学术 (Google Scholar) 引用数据显示,该书已被引用超过7.5万次,是一本不可多得的好书。目前,人民邮电出版社已获得授权在国内出版,并发行了中文版与英文版。
二、机器学习领域经典中文著作《机器学习》,南京大学周志华教授西瓜书。
