-
在MATLAB命令提示符中输入smnew,打开Simscape Multibody模块库和具有常用模块的模板。
-
复制一个 Rigid Transform模块,并将其粘贴到模型中。使用Rigid
Transform模块可以创建新坐标系,在多体模型装配时用来连接关节。
-
根据模型需要,选择删除 Simulink-PS Converter, PS-Simulink Converter,和 Scope这些模块。
-
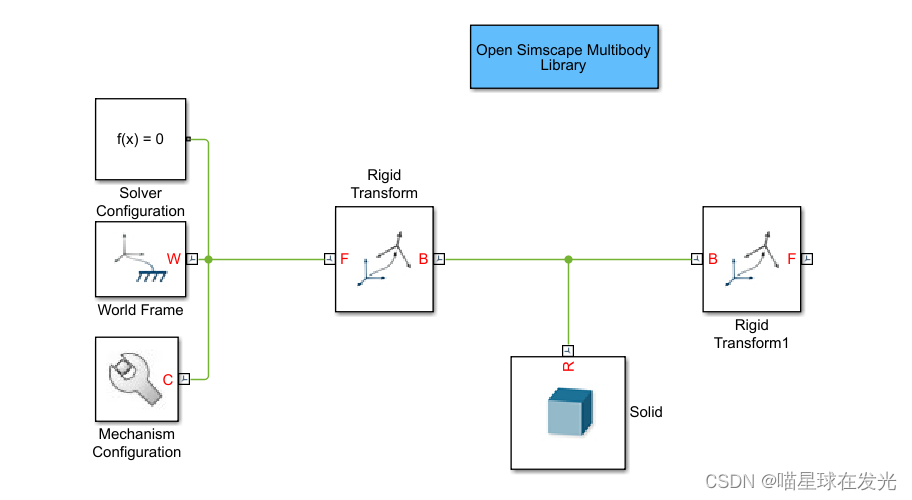
按照图中所示连接其余的块。确保 Rigid Transform模块的基础坐标系(B)口都连向Solid模块坐标系(R)接口。由于每个Rigid Transform模块都对其坐标系应用空间变换,因此交换接口连接会改变两坐标系的空间关系。
-
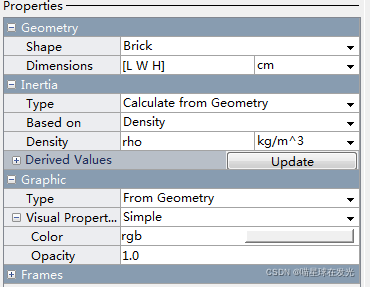
在Solid对话框中,指定以下参数。稍后,将使用包含Solid和 Rigid
Transform的子系统块来定义所显示的MATLAB变量。其优点是,该方法从一处更新在多个模块中使用的变量。
-
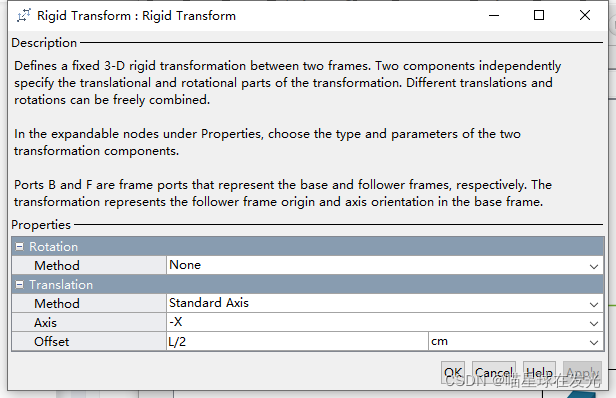
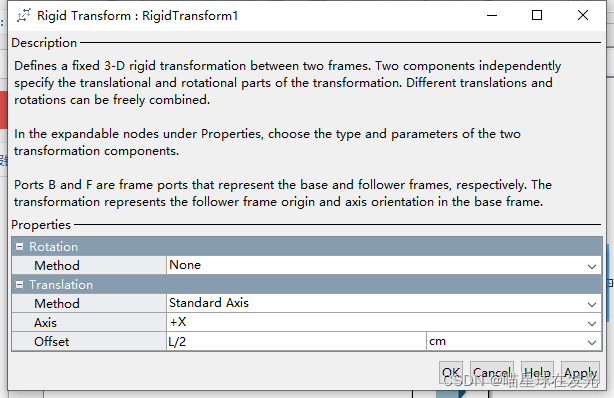
在 Rigid Transform 和 Rigid Transform1 模块的对话框中,指定以下参数。 这些参数指,相对于Solid参考坐标系, Rigid Transform模块的B和F坐标系之间的偏移。