dst = cv2.blur(src, ksize[, dst[, anchor[, borderType]]])
dst :均值滤波操作后的结果图像
src: 输入图像,即需要处理的图像
ksize :滤波核的大小
dst,anchor,borderType:可选参数。
程序演示
Author: Will Wang
Email: [email protected]
import cv2
import numpy as np
ksize = (3, 3)
noise = cv2.imread('noise.jpg', cv2.IMREAD_GRAYSCALE)
noise = cv2.resize(noise, (512, 512))
mean = cv2.blur(noise, ksize)
image_stack = np.hstack((noise, mean))
cv2.imshow('noise, mean', image_stack)
cv2.waitKey(0)
cv2.destroyAllWindows()
本例中采取的kernel size为 3x3,平滑效果如下:

如果修改kernel size 为7x7,

卷积核越大,参与到均值运算中的像素就会越多,即当前点计算的是更多点的像素值的平均值。因此,卷积核越大,去噪效果越好,当然花费的计算时间也会越长,同时图像失真也会越严重。在实际处理中,要在失真和去噪效果之间取得平衡,选取合适大小的卷积核。
2. 高斯滤波
在进行均值滤波时,其邻域内每个像素的权重是相等的。在高斯滤波中其邻域每个像素点的权重是不同的,高斯滤波会给中心点更大的权重,而减小远离中心点的权重,在此基础上计算邻域内各个像素值不同权重的和。
基本原理
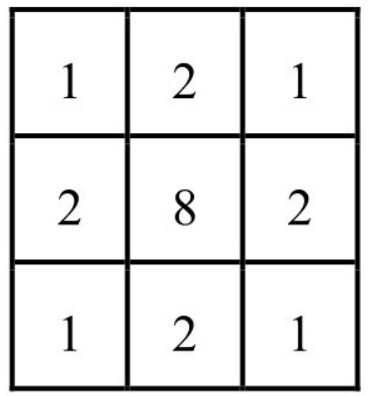
在高斯滤波中,卷积核中的值不再都是1。例如,一个3×3的卷积核可能如下图所示:
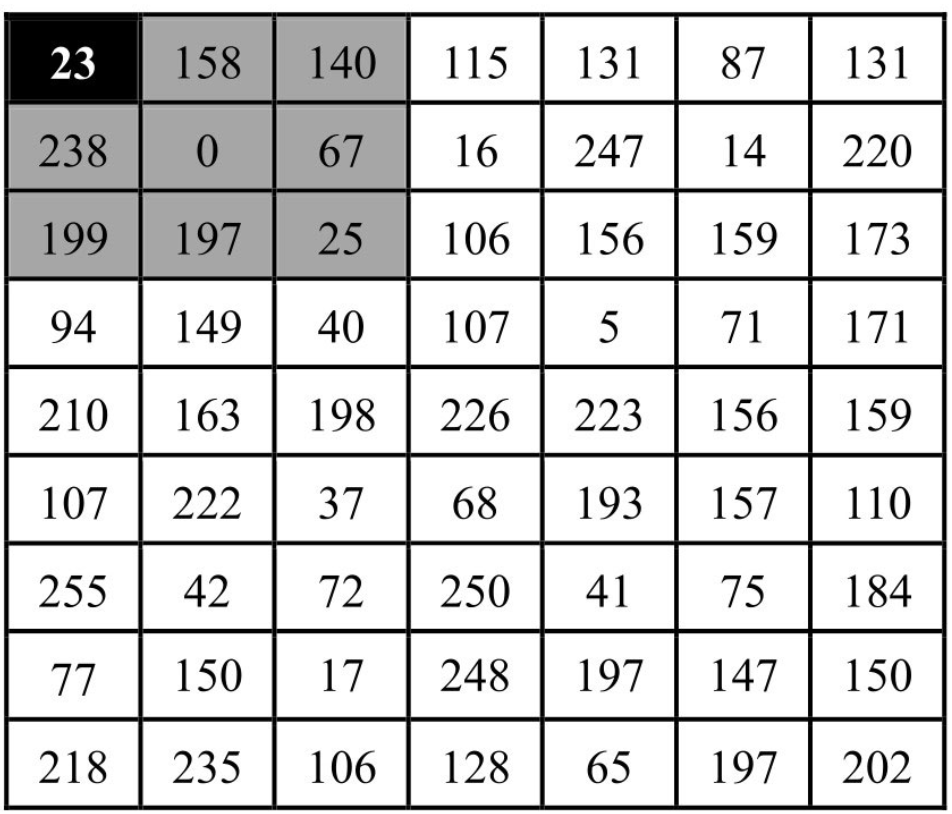
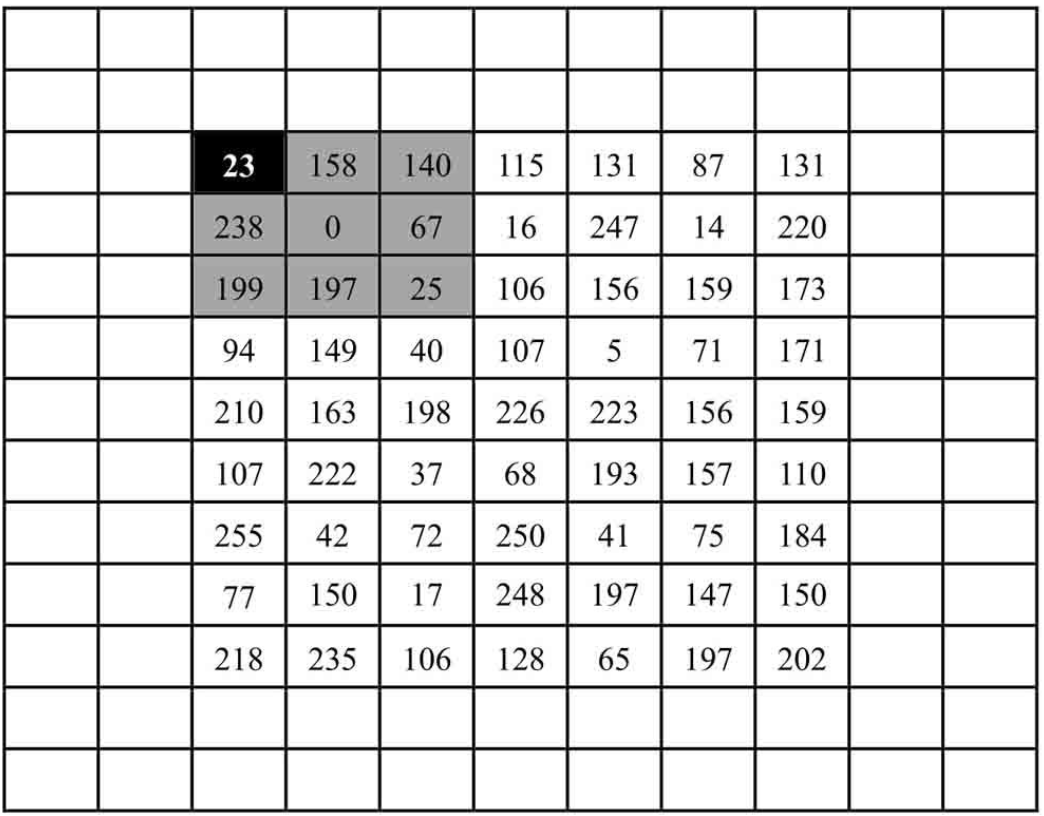
如下图,针对最左侧的图像内第4行第3列位置上像素值为226的像素点进行高斯卷积,其运算规则为将该点邻域内的像素点按照不同的权重计算和:
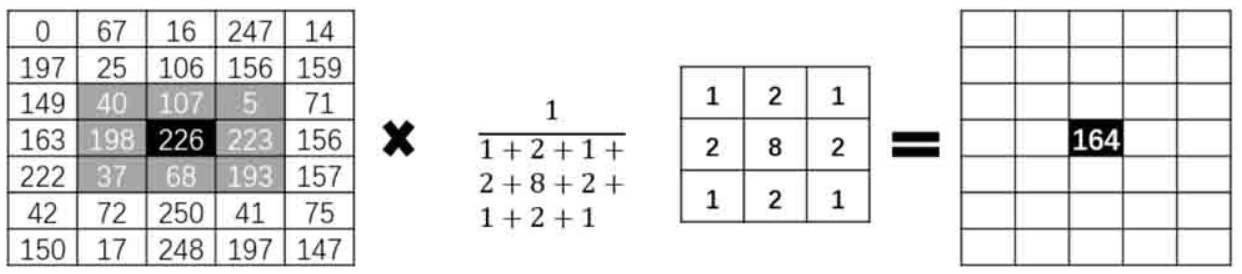
在实际计算时,使用的卷积核如下图卷积核所示:

其计算方式为:
(40x0.05+107x0.1+5x0.05+198x0.1+226x0.4+223x0.1+37x0.05+68x0.1+193x0.05),然后将该计算结果代替原像素值,以此类推,我们针对每一个像素点进行滤波计算,即可得到整幅图像的高斯滤波结果。
在实际计算中,卷积核是归一化处理的,其形式可以为小数或者分数形式。有时候,给出的卷积核并没有进行归一化,这样的卷积核是为了说明问题用的,实际使用时往往需要进行归一化。严格来讲,使用没有进行归一化处理的卷积核进行滤波,得到的结果往往是错误的。
高斯滤波函数
在openCV中,实现均值滤波的函数是cv2.blur(),语法格式如下:
dst = cv2.GaussianBlur(src, ksize, sigmaX[, dst[, sigmaY[, borderType]]])
dst :高斯滤波操作后的结果图像
src: 输入图像,即需要处理的图像
ksize :滤波核的大小。滤波核大小是指在滤波处理过程中其邻域图像的高度和宽度。滤波核的值必须是奇数
sigmaX:卷积核在水平方向上(X轴方向)的标准差,其控制的是权重比例。例如,下图是不同的sigmaX决定的卷积核,它们在水平方向上的标准差不同
sigmaY:卷积核在垂直方向上(Y轴方向)的标准差。如果将该值设置为0,则只采用sigmaX的值;如果sigmaX和sigmaY都是0,则通过ksize.width和ksize.height计算得到:
sigmaX=0.3×[(ksize.width-1)×0.5-1] + 0.8
sigmaY=0.3×[(ksize.height-1)×0.5-1] + 0.8
dst,borderType:默认即可
在该函数中,sigmaY和borderType是可选参数。sigmaX是必选参数,但是可以将该参数设置为0,让函数自己去计算sigmaX的具体值。
官方文档建议显式地指定ksize、sigmaX和sigmaY三个参数的值,以避免将来函数修改后可能造成的语法错误。当然,在实际处理中,可以显式指定sigmaX和sigmaY为默认值0。因此,函数cv2.GaussianBlur()的常用形式为:
dst = cv2.GaussianBlur(src, ksize, 0, 0)
noise = cv2.imread('noise.jpg', cv2.IMREAD_GRAYSCALE)
noise = cv2.resize(noise, (512, 512))
gaussian_blur = cv2.GaussianBlur(noise, ksize, 0, 0)
image_stack = np.hstack((noise, gaussian_blur))
cv2.imshow('noise, gaussian_blur', image_stack)
cv2.waitKey(0)
cv2.destroyAllWindows()
本例中采取的kernel size为 3x3,

如果修改kernel size 为7x7,
基本原理
中值滤波与前面介绍的滤波方式不同,不再采用加权求均值的方式计算滤波结果。它用邻域内所有像素值的中间值来替代当前像素点的像素值。
例如,针对下图中第4行第4列的像素点,计算它的中值滤波值。
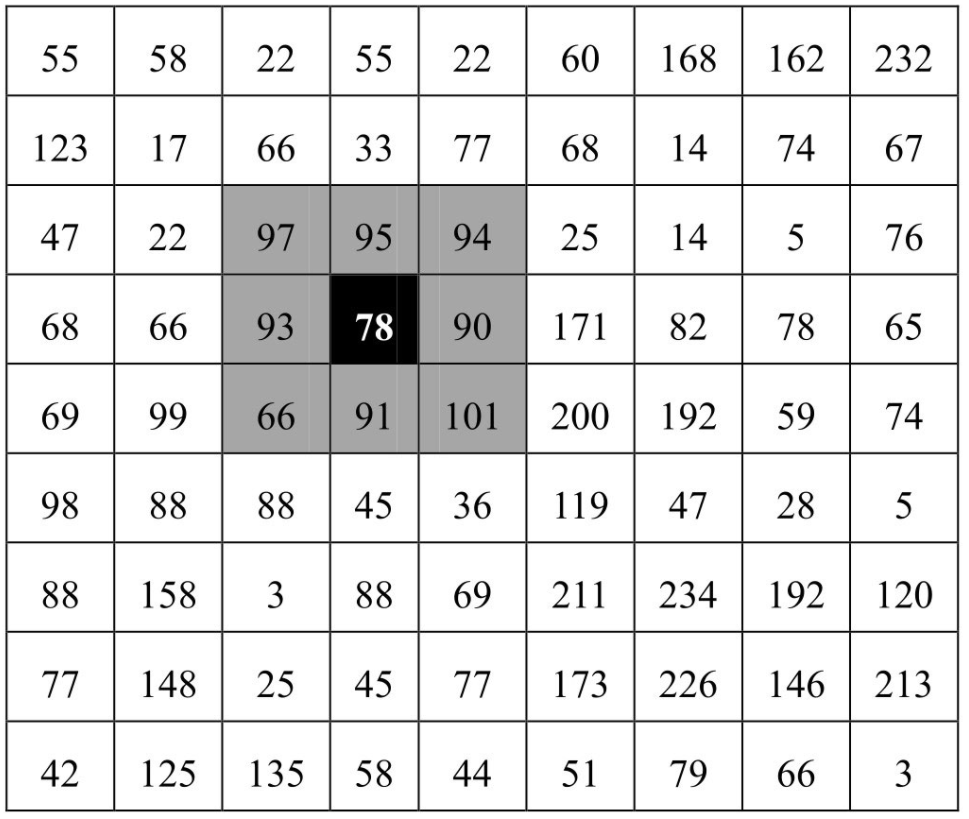
将其邻域设置为3×3大小,对其3×3邻域内像素点的像素值进行排序,按升序排序后得到序列值为:[66,78,90,91,93,94,95,97,101]。在该序列中,处于中心位置(也叫中心点或中值点)的值是93,因此用该值替换原来的像素值78,作为当前点的新像素值,处理结果如下图所示:
中值滤波函数
在openCV中,实现中值滤波的函数是cv2.medianBlur(),其语法格式如下:
dst = medianBlur(src, ksize[, dst])
dst :高斯滤波操作后的结果图像
src: 输入图像,即需要处理的图像
ksize :滤波核的大小
其中需要注意的是ksize核的大小必须是比1大的奇数(注意是数字),比如3,5,7等。
程序演示
Author: Will Wang
Email: [email protected]
import cv2
import numpy as np
noise = cv2.imread('noise.jpg', cv2.IMREAD_GRAYSCALE)
noise = cv2.resize(noise, (512, 512))
median_blur = cv2.medianBlur(noise, 3)
image_stack = np.hstack((noise, median_blur))
cv2.imshow('noise, median_blur', image_stack)
cv2.waitKey(0)
cv2.destroyAllWindows()
中值滤波对含有椒盐噪声的图像特别有效,其结果如下图所示:

在中值滤波处理中,噪声成分很难被选中,所以可以在几乎不影响原有图像的情况下去除所有的噪声,但是由于需要进行排序等操作,中值滤波需要的运算较大,但是中值滤波可以很好地去除椒盐噪声。