笔者水平有限,欢迎更正补充
1.
Reference Frame:
即参考基坐标系,说白了他的作用就是在仿真结果处能让你清楚的看到变换过后的坐标系此时的方向位置。在用simscape建模时,建一或者两个连杆的模型你不用reference frame还能爽一爽(事实上两个连杆你也爽不了,后面我们讲二连赶建模时会说到),但是当你的模型连杆数量变多,当系统逐渐变复杂,需要关注的坐标系的数量会多到你头疼。在关键的地方都放上一个参考坐标系能让你对整个系统的坐标系有个比较准确的把握。
应用场景与使用方法:
参考坐标系不是必须的,使用它是为了给咱的建模仿真带来方便。可以在零件建模时,在任何需要知道
某个坐标系的位置和方向
的情况下使用。
举个栗子:要一个连杆两端两个旋转关节的相对位置,可以使用参考坐标系来确定两个旋转关节位置时。
我们选择连杆几何中心连一个参考坐标系。然后相对该参考坐标系,分别向前后两个方向平移一半连杆长度得到两个旋转关节的两个座标系,将它们Base端同时连接R口。

此时你进行仿真,可以知道这个这个零件几何中心处坐标系的方位,但是分别经过transform1和transform2变换过后的坐标系飘哪里了咱并不清楚。因此可以再在两个变换后分别加上reference frame,这样再进行仿真。仿真结果界面坐标会多出两个参考坐标系。点击即可看到具体方位。
2.Rigid Transform

即刚性坐标转换,通常与参考基座标系一起使用,用来定义坐标之间的相对位置。
应用场景与使用方法:
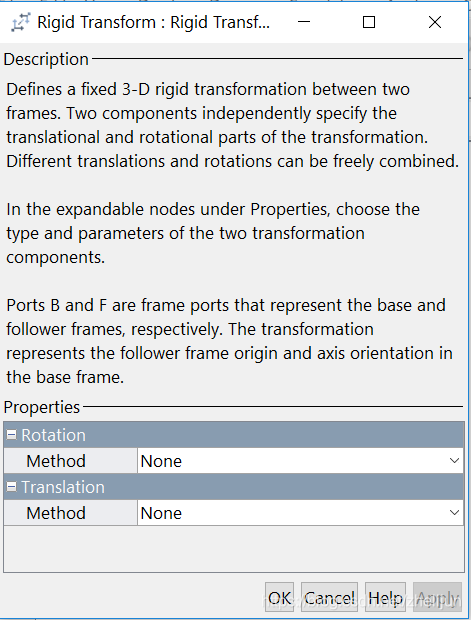
在已有一个坐标系的情况下,确定下一个坐标系(Follower口)相对于前一个坐标系(Base口)的位置时使用(见上面那个栗子)。也正因此,固定坐标系可以调节
跟随坐标系
与
基座标系
之间的关系(比如是平移还是旋转,相对于哪个轴旋转,沿着哪个轴平移,旋转和平移的量各是多少)。
注意,如果你同时定义了旋转与平移。那么这个block执行动作的顺序是先平移再旋转
3.Transform Sensor:
测量两个坐标系之间(F相对于B)的关系
应用场景:
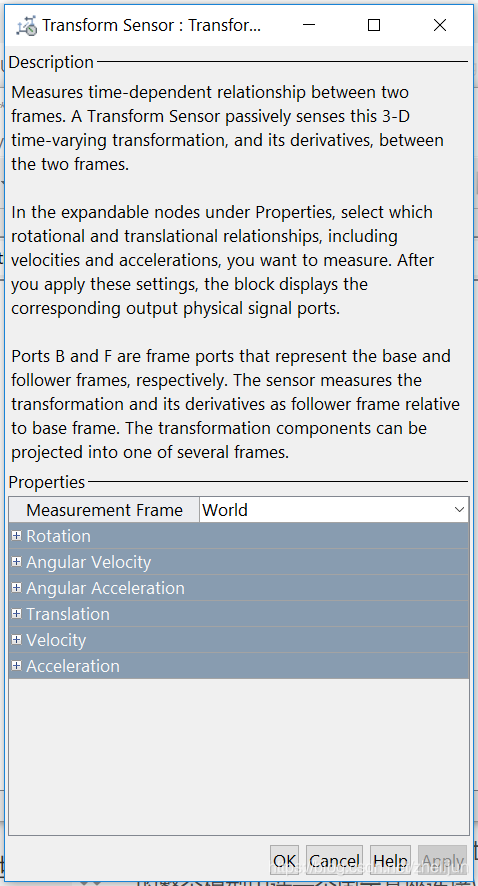
想要测量两个刚体之间的位置关系,速度关系,加速度关系都可以用这个来测量。Base口连接基座标系,Follower口连接想要测量的坐标系。
4.World Frame 世界坐标系:

整个模型的基座标系,一个模型可以有多个世界坐标系,但都只能代表一个世界坐标系。
应用场景和使用方法:
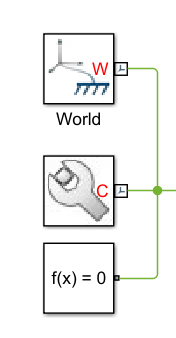
每次建模先拖一个世界坐标系进来作为你模型的全局基坐标系,然后在你的整个模型中选一个固定基座连接W口,通常与Mechanism Configuration以及Solver configuration一并使用。
Simscape/Multibody/Frames and Transforms笔者水平有限,欢迎更正补充1.Reference Frame:即参考基坐标系,在建模时如果所有零件块或者关节都相对于全局基坐标系会非常不方便,这个参考坐标系可以在方便建模时给你一个局部的参考基坐标系。应用场景与使用方法:参考坐标系不是必须的,使用它是为了给咱的建模仿真带来方便。可以在零件建模时在任何需要相对...
软件版本:
MATLAB
R2019a
学习目标:理清物理建模时的坐标转换问题,建立简单的单摆模型。
1.创建一个新文件:命令行输入smnew,会生成一个
Sims
ca
pe
Multi
body
模型模板,或者直接在
simulink
中自己创建;
2. 为了更好的理解
坐标系
的转换功能,我们先建立一个简单的连杆模型,了解一下
坐标系
的变换。
3. 复制一个Rigid
Transform
,完成如下图所示的连线,Solid、
Transform
1和
Transform
中的参
本科学机械设计的时候,就发现ppt上有很多运动的机构,一直想知道是怎么做出来的,后来发现solidwork、admas可以制作动画,也用3dmax制作过,但总感觉不太像回事。
这是一个共轴旋翼的运动仿真,也是意外的发现simlink竟然可以做那么多有趣的事。碰巧研究了一下
sims
ca
pe
_
multi
body
。
笛卡尔运动规划Python接口https://blog.csdn.net/qq_32618327/article/details/99966978
笛卡尔运动规划C++接口https://blog.csdn.net/flyfish1986/article/details/81189737
Moveit!官网API介绍:http://docs.ros.org/kinetic/api/moveit...
import moveit_commander
from moveit_msgs.msg import RobotTrajectory
from trajectory_msgs.msg import JointTrajectoryPoint
from geometry...
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录一、
Sims
ca
pe
Multi
body
产品描述1.
Sims
ca
pe
Multi
body
建模和仿真2.主要功能二、
Multi
body
模型分析1.基本模型组成1.1四连杆模型的基本组件1.2子系统组成2.模型驱动3.动态传感
一、
Sims
ca
pe
Multi
body
产品描述
1.
Sims
ca
pe
Multi
body
建模和仿真
Sims
ca
pe
Multi
body
为三维机械系统提供了一个多体仿真环境,如机器人、车辆悬架、建筑设备和飞.
当你在
CA
D软件中做好一个装配体时,需要对其进行运动仿真或者是动力学仿真,可以尝试用
simulink
中的
sims
ca
pe
模块。
这个模块可以让你很清楚的了解机构之间的装配与运动关系,在此基础上也可以去做一些优化设计。
sims
ca
pe
multi
body
link可以将你的
CA
D模型转化为
Sims
ca
pe
Multi
body
环境中的程序结构,目前该插件支持在Solidworks、Autodesk Inventor和Creo等三维软件中进行转换
如何把SolodWorks模型导入到
Matlab
需要啥准备工作怎么做如何插入一段漂亮的代码片生成一个适合你的列表创建一个自定义列表如何创建一个注脚注释也是必不可少的导入
SolidWorks2016
Matlab
2018a
Sims
ca
pe
Multi
body
Link 安装文件
1.去这里https://www.mathworks.com/products/simmecha...
1.什么是URDF?
URDF全称(United
Robotics
Description Format)统一机器人描述格式,是一个XML语法框架下用来描述机器人的语言格式,URDF在ROS界很流行。我们可以通过URDF对机器人建模然后放到ROS
里面
进行仿真与分析,也可以把一个URDF文件转换成
sims
ca
pe
模型,在
Simulink
里面
进行仿真分析或者控制器设计。
2.URDF文件长啥样?
UR...
1.URDF 转化成 rigid
body
tree格式
打开
matlab
,新建一个实时编辑器,定位到刚刚的urdf文件位置,并把meshes文件夹添加到
matlab
路径
运行以下代码
clear
robot = importrobot(...
### 回答1:
Sims
ca
pe
Multi
body
是基于
Simulink
平台的一个多体动力学仿真工具,在机械、航空、汽车等领域都有广泛应用。为了更好地
使用
这个工具,建议首先从官方网站了解教程和文档。这些资源以易于理解的方式介绍
Sims
ca
pe
Multi
body
的基本原理、模型构建、仿真操作等方面的知识。
在学习过程中,建议先从
Simulink
基础开始学起,例如掌握建立模型、添加仿真器等基本操作。熟悉这些操作后,可以学习
Sims
ca
pe
工具箱中的
Multi
body
部分,掌握多体系统的建模方法、运动学方法、动力学方法等。在这个过程中,可以通过官网提供的示例来练习,并结合自己的应用需求进行实践。
此外,建议多加了解
Sims
ca
pe
Multi
body
的工具和应用,例如运动学仿真、动力学仿真、控制设计等。这可以通过查阅文献、参加培训、交流等方式来完成。
最后,要注意
使用
Sims
ca
pe
Multi
body
时需要有一定的数学和物理基础,不仅要熟悉多体系统的理论,还要了解微积分、线性代数等数学知识,以及动力学、力学、材料力学等相关科学知识。只有全面掌握背景知识,才能正确理解和
使用
Sims
ca
pe
Multi
body
。
### 回答2:
Sims
ca
pe
Multi
body
是
MATLAB
Simulink
中一款先进的工具箱,用于多体系统的建模和仿真。该工具箱具有高度可定制化和灵活性,可进行各种机械系统的建模,如机械臂,汽车悬挂系统,弹簧减震器等。
Sims
ca
pe
Multi
body
的教程提供了深入的学习资料,包括理论基础、案例研究、演示视频和实践项目。教程旨在帮助用户了解该工具箱的功能和特点,快速掌握建模和仿真技术。
在教程中,用户将学习如何
使用
Sims
ca
pe
Multi
body
进行建模和仿真,包括如何创建部件,连接它们,分配参数和添加传感器等。同时,用户还将学习一些高级技术,如动力学分析,控制策略等。
除了基本的多体动力学建模,
Sims
ca
pe
Multi
body
还提供了丰富的工具箱,可用于建模和仿真气体系统,流体力学系统,电子控制系统等。这为用户提供了更多的选择和灵活性,使其能够应对各种真实世界的挑战和需求。
总的来说,
Sims
ca
pe
Multi
body
教程是学习该工具箱的绝佳资源,
使用
户能够充分利用它的功能和潜力,快速实现各种机械系统的建模和仿真。

