首先从海康官方下载软件
https://www.hikrobotics.com/service/soft.htm?type=1
选择linux ARM
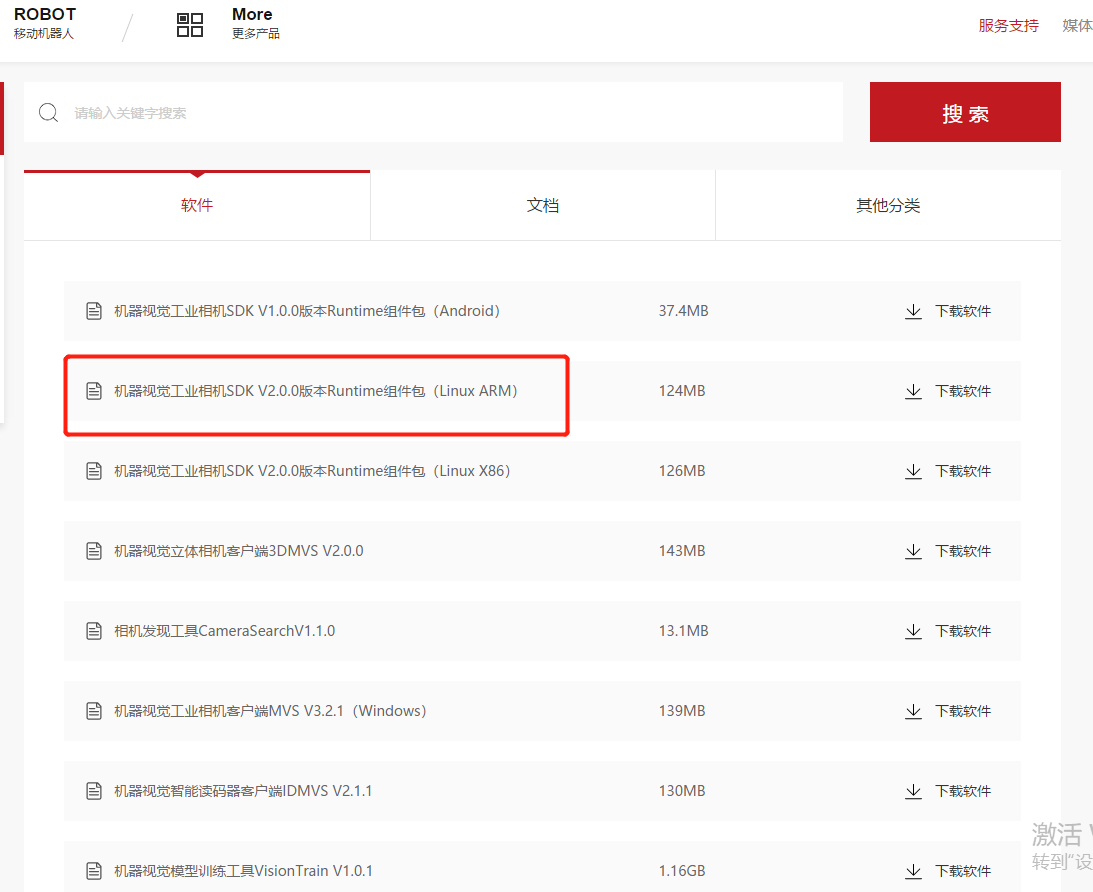
下载之后选择里面的 MVS-1.0.0_aarch64_20190708.tar.gz 这个是64位架构的 ARMHF是32位架构上使用的
解压之后 如果直接安装的话因为ubuntu18.04删除了
/etc/rc.local
直接安装的话会报错 首先新建一个
rc.local
文件
root用户下
touch /etc/rc.local
然后直接运行 ./setup
安装目录下有用户手册,或者直接解压安装包也能找得到。
在第10页能找得到。 但是无论执行./MVS.sh 或者 ./MVS 都显示error 错误
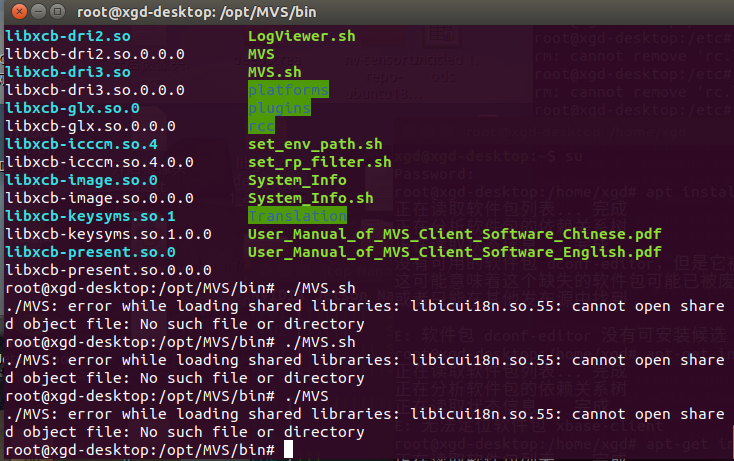
去ubuntu16 ARM版本 找到里面的libicu55_55.1-7ubuntu0.3_arm64.deb 放上面安装
dpkg -i libicu55_55.1-7ubuntu0.3_arm64.deb
链接:https://pan.baidu.com/s/1a64qHoon7JdODG-3pMHsFw
提取码:w1ff
文章最后感谢一下 大神
https://blog.csdn.net/liwuxin1/article/details/106335426/
感觉自己就是在实践一次
首先从海康官方下载软件 https://www.hikrobotics.com/service/soft.htm?type=1选择linux ARM 下载之后选择里面的 MVS-1.0.0_aarch64_20190708.tar.gz 这个是64位架构的 ARMHF是32位架构上使用的解压之后 如果直接安装的话因为ubuntu18.04删除了/etc/rc.local直接安装的话会报错 首先新建一个rc.local文件root用户下to...
环境:VMwareWorkstation15.5.1+Ubuntu16.04+相机型号:MV-CE050-31GM
这里写目录标题1.Linux
系统
下M
VS
的
安装
2.
安装
步骤3.软件运行4.切换虚拟机为桥接模式操作流程5.示例程序运行
1.Linux
系统
下M
VS
的
安装
1.在
海康
机器人的官网,下载相应的客户端
安装
包。
海康
机器人官网:htt.
2. 接下来,根据你的需求选择不同的ROS版本进行
安装
。如果你的存储空间较大,建议
安装
完整桌面版,可以使用以下命令进行
安装
:
sudo apt install ros-melodic-desktop-full
3.
安装
完成后,需要将ROS的环境变量添加到你的bashrc文件中,这样每次打开终端时都会自动加载ROS环境。可以使用以下命令将环境变量添加到bashrc文件中:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
4. 最后,
安装
一些ROS的依赖包,可以使用以下命令进行
安装
:
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
5. 初始化rosdep,可以使用以下命令进行初始化:
sudo rosdep init
rosdep update
这样,你就成功在
Jet
son
Nan
o上
安装
了ROS。请注意,以上步骤是基于Ubuntu 18.04的
安装
过程。如果你使用的是其他版本的Ubuntu,请参考ROS官方文档进行相应的
安装
步骤。\[1\]\[2\]\[3\]
#### 引用[.reference_title]
- *1* *3* [
Jet
son
-
nan
o-
Ubuntu18.04
-
安装
ROS](https://blog.csdn.net/maijiayong/article/details/109910366)[target="_blank" data-report-click={"spm":"1018.2226.3001.9630","extra":{"utm_source":"vip_chatgpt_common_search_pc_result","utm_medium":"distribute.pc_search_result.none-task-cask-2~all~insert_cask~default-1-null.142^v91^control,239^v3^insert_chatgpt"}} ] [.reference_item]
- *2* [步骤一:
Jet
son
Nan
o
安装
ROS步骤,及相关错误分析](https://blog.csdn.net/m0_60254369/article/details/126469198)[target="_blank" data-report-click={"spm":"1018.2226.3001.9630","extra":{"utm_source":"vip_chatgpt_common_search_pc_result","utm_medium":"distribute.pc_search_result.none-task-cask-2~all~insert_cask~default-1-null.142^v91^control,239^v3^insert_chatgpt"}} ] [.reference_item]
[ .reference_list ]

